
En pick-and-place-robotarm kan revolutionere effektiviteten og produktiviteten i enhver produktionsproces, men det er vigtigt, at den implementeres på den rigtige måde.
Opnå en effektiv, hurtig og præcis produktion
Kollaborative robotter sikrer en hurtig, stabil og sikker udførsel af forskellige typer produktionsopgaver, som ofte kan være yderst repetitive, f.eks. pick-and-place. Derfor vil det være mere effektivt både ift. tid og omkostninger at delegere denne opgave til en cobot.
Robotteknologi i industrien er i vækst
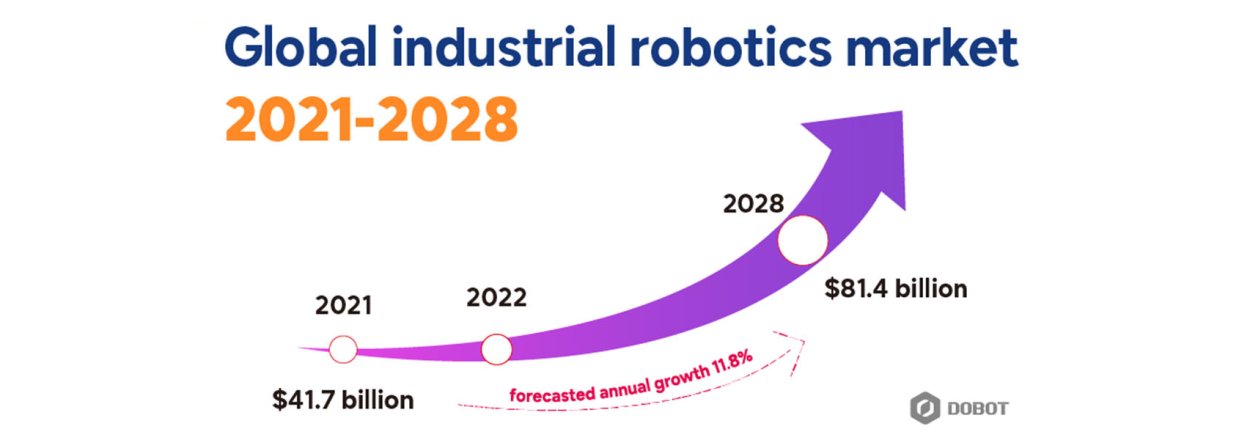
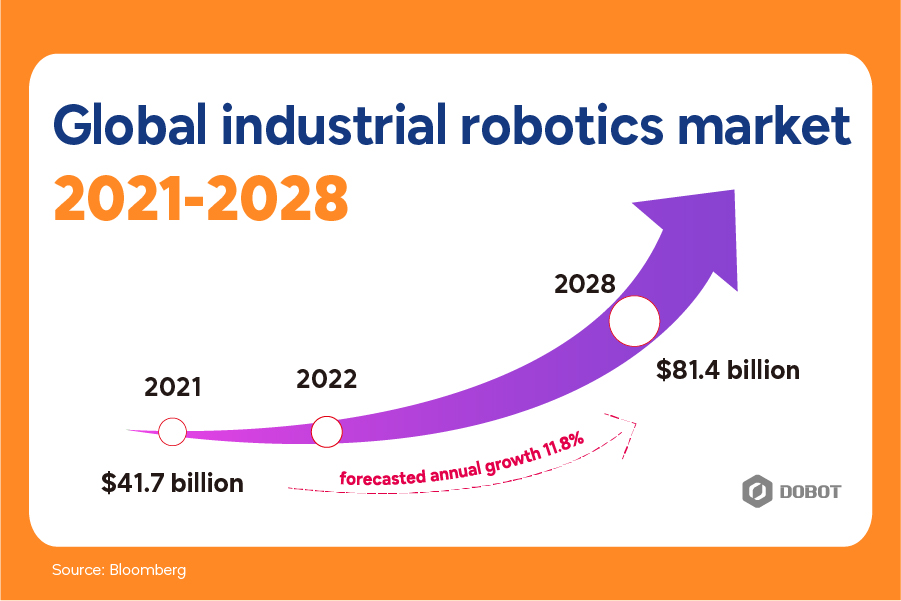
Markedet for robotter i industrien vokser med fart. Ifølge Bloomberg forventes markedet for industrielle robotter at vokse med et gennemsnitligt årligt afkast (CAGR) på ca. 11,8 % (2022-2028), og markedet er vurderet til omkring 41,7 milliarder USD i 2021 og forventes at nå op på omkring 81,4 milliarder USD i 2028.
Mange virksomheder drager fordel af robotprocesautomatisering (Robotic Process Automation – RPA), som er en af dette års robottrends. Derfor kan investering i robotprocesautomatisering blive en livstidsbeslutning for enhver virksomheds livscyklus.
Pick-and-place-cobots i industrien
Pick-and-place er en relativt simpel opgave, og kollaborative robotter kan i de fleste tilfælde håndtere denne repetitive opgave. Inden for følgende områder giver det god mening at implementere en pick-and-place-cobot:
- Fødevareforarbejdningsindustrien
- Elektronikindustrien
- Medico- og lægemiddelindustrien
- Detailhandel
- Bilindustrien

Fødevareforarbejdning
I fødevareindustrien er emballering og palletering væsentlige områder, hvor en pick-and-place-robotarm kan anvendes. Pick-and-place-cobots er nemme at programmere, hvilket sikrer en hurtig installation og hurtig idriftsættelse. Det sparer tid og penge, hvilket gør det muligt at tildele de menneskelige medarbejdere de mere komplicerede opgaver og lade de kollaborative robotter klare de ensformige opgaver.
Elektronikindustrien
En pick-and-place-cobot er sikker at arbejde sammen med, og at introducere den i fremstillingsprocesserne inden for elektronikproduktion vil resultere i større præcision, kapacitet og effektivitet. Batterier, opladere, processorer, skærme og andre små dele kan nogle gange være udfordrende at flytte rundt. Dobots pick-and-place-robotarme kommer med en bred vifte af robottilbehør, såsom gribere, sugekopper og andre ende-på-arm-værktøjer, og derfor kan robotarmene udføre præcis og nøjagtig pick-and-place.
Lægemiddelindustrien
Menneskelige medarbejdere udfører en lang række opgaver i medico- og lægemiddelindustrien. I laboratorier er høj nøjagtighed i processer, der indeholder farlige væsker og andre stoffer, afgørende. En pick-and-place-cobot kan sikre omhyggelig laboratorieanalyse og medicinsk præcision, når væsker måles, hældes og placeres det rigtige sted.
Hvad skal du være opmærksom på, når du vælger en cobot?
Et af de første trin ifm. valg af cobot er at overveje dens rækkevidde og belastningskapacitet for at sikre, at den passer til det specifikke produktionsmiljø. Dette gælder for alle applikationer - ikke kun pick-and-place. Det er også vigtigt at tage hensyn til dens hastighed og præcision for at sikre, at den kan håndtere de krav, der stilles til produktionen. Når en cobot skal implementeres, er det vigtigt at vælge det rette robottilbehør og end-of-arm-tools fra start.
Følgende faktorer skal overvejes ifm. valg af cobot:
1. Akser
Akser (axis) refererer til antallet af bevægelsesretninger, som robotarmen kan bevæge sig i. Jo flere akser en robotarm har, desto mere fleksibilitet og præcision kan den tilbyde i produktionsprocessen. En 6-akset robotarm er mere fleksibel og kan implementere flere funktioner på en produktionslinje, mens der med en 4-akset cobot ikke er samme muligheder for tilpasning, retning og orientering.
2. Rækkevidde
Rækkevidde (reach) refererer til den maksimale afstand, som robotarmen kan nå. Det er vigtigt at vælge en robotarm med en rækkevidde, der passer til produktionsmiljøet, da det kan påvirke dens evne til at håndtere materialer og objekter på en effektiv måde.
3. Gentagelsesnøjagtighed
Gentagelsesnøjagtighed (repeatability) refererer til robotarmens evne til at gentage en bestemt bevægelse med samme præcision hver gang. Dette er vigtigt for at sikre, at produktionsprocessen er konsistent og pålidelig, og at der ikke opstår fejl pga. unøjagtigheder i robotarmens bevægelser.
4. Hastighed
Det er vigtigt at vælge en robotarm, der har en høj nok hastighed til at håndtere den forventede produktionshastighed. En hurtig robotarm kan reducere produktionscyklustiden og øge produktiviteten.
5. Vision
Et vision-system kan hjælpe robotarmen med at genkende og placere objekter mere præcist. Det er vigtigt, at vision-systemet passer til produktionsprocessen og at integrere det med robotarmen korrekt for at opnå optimal ydeevne.
Hvilken cobot skal du vælge til pick-and-place?
Dobot MG400, Dobot M1 Pro, Hitbot Z-ARM og Dobot CR kollaborative robotarme er alle velegnede til pick-and-place-applikationer. Se eksempler nedenfor.
Pick-and-Place med Dobot CR5 kollaborativ robotarm
Pick-and-Place med Dobot CR5 kollaborativ robotarm
Pick-and-Place med Dobot M1 Pro SCARA robotarm
Pick-and-Place med Dobot CR5 kollaborativ robotarm
Pick-and-Place med Dobot CR5 kollaborativ robotarm
Pick-and-Place med MG400 kollaborativ desktop-robotarm
To Dobot MG400 udfører pick-and-place i metalforarbejdningsindustrien
DOBOT CR10 med vision og AGV udfører pick-and-place af komponenter på flere arbejdsstationer
Pick-and-place ifm. svejsning med Dobot MG400 kollaborativ robotarm
Læs mere om pick-and-place med en kollaborativ robot.
Har du spørgsmål, kontakt venligst produktchef Michael Petersen på tlf. +45 3679 0003 eller e-mail mp@dia-tech.dk
Se mange flere videoer af DOBOT på Dia-Techs YouTube-kanal.
Se også vores andre automatiseringsløsninger, bl.a. xyz-doseringsrobotter, elektriske robotgribere, robottilbehør og andre kollaborative robotarme.
Kontakt os, hvis du har spørgsmål eller brug for vejledning til den rette løsning!
E-mail: info@dia-tech.dk | Ring: +45 3679 0005
Læs mere om valg af pick-and-place-cobot på Dobots hjemmeside.